2020.07.11 에 네이버블로그에서 작성했던 글입니다.
HOW TO MAKE AN ARDUINO QUADCOPTER DRONE : STEP-BY-STEP DIY PROJECT
https://www.mydronelab.com/blog/arduino-quadcopter.html
How to Build Arduino Quadcopter Drone: Step-by-Step DIY Project
Comprehensive step-by-step instructions on how to build Arduino quadcopter from scratch based on Arduino Uno board. List of necessary components. What motor and propellers to use? How to solder and wire everything together. Tips from professionals.
www.mydronelab.com
[ GENERAL "QUAD SCIENCE" ]
4가지 움직임 가능 : Altitude, Roll, Yaw, Pitch
여러가지 센서 : gyro, barometer, GPS, sonar 등등
[ COMPONENTS YOU WILL NEED FOR YOUR QUAD ]
PART #1 [ Frame ]
▣ 구성 : Center Holding Plate, Arms, Motor Brackets
▣ 재료 : aluminum, carbon fiber, wood
▣ aluminum : 가볍고 싸지만, 모터 진동 상쇄 잘 못하고 센서 교란시킬 수 있음.
▣ carbon fiber : 모터 진동 상쇄 굿. 비싸다. 가장 좋은 선택
▣ wood : 진동 흡수. 파손 가능성 높음.
PART #2 [ BRUSHLESS MOTORS ]
▣ Kv-rating : 전압에 따른 RPM
PART #3 [ PROPELLERS ]
▣ 프로펠러가 추력을 발생시킨다.
▣ 표준화되어있음.
▣ 잘 쓰는 조합
5 pitch, 8 diameter : 작은 드론
8 pitch, 9 diameter : 작은 드론
5 pitch, 10 diameter : 중간 드론
7 pitch, 10 diameter : 중간 드론
5 pitch, 12 diameter : 큰 드론
PART #4 [ESCs]
▣ 모터 스피드 제어.
▣ input : battery -> output : three phases
▣ 최대 전류 확인
PART #5 [Battery]
▣ Lipo : 안 무겁고, 원하는 크기의 전류를 제공함.
PART #6 [IMU]
▣ 6DOF IMU : 3-aixs gyroscope + 3-axis accelerometer
▣ 드론의 방향, 속도, 중력 측정해서 모터 속도 제어.
PART #7 [FLIGHT CONTROLLER]
▣ 아두이노 우노 추천함
PART #8 [RC TRANSMITTER]
▣ two modes : acrobatic or stable
[ WIRING, SOLDERING, AND PROGRAMMING ]
SCHEMATICS

HOW TO SOLDER EVERYTHING TOGETHER
납땜
HOW TO WIRE EVERYTHING
그라운드 다 연결하고 위에 스케메틱대로 연결하세요.
5V는 어디서 오는거지
HOW TO PROGRAM YOUR ARDUINO FLIGHT CONTROLLER
멀티위 다운 - MultiWii.ino 실행 - config.h 창 찾기 - config.h에서 만들려는 드론과 맞는 설정 주석 처리 지움 - 아두이노에 다운 - MultiWiiConf.exe 실행
Project YMFC-AL - The Arduino auto-level quadcopter
http://www.brokking.net/ymfc-al_main.html
Brokking.net - Project YMFC-AL - The Arduino auto-level quadcopter - Home.
Brokking.net - Project YMFC-AL - The Arduino auto-level quadcopter - Home. Project YMFC-AL - The Arduino auto-level quadcopter The YMFC-AL is an auto-leveling Arduino Uno based quadcopter that is easy to build and fun to fly. Auto leveling means that, when
www.brokking.net
[ Step 1 - Software ]
▣ YMFC-AL.zip
Step 2 - Hardware
▣ 1 x 450 size frame with integrated power distribution board
▣ 4 x 1000kV motor / 10x4.5 props / ESC combo
▣ 1 x 3S / 2200mAh / 30C lipo
▣ 1 x Arduino Uno or Funduino Uno
▣ 1 x MPU- 6050 gyro / accelerometer
▣ 1 x Flysky FS-T6 6-CH TX Transmitter
▣ 1 x 2S/3S lipo battery charger
[ Step 3 - The build ]
▣ Building the YMFC quadcopter
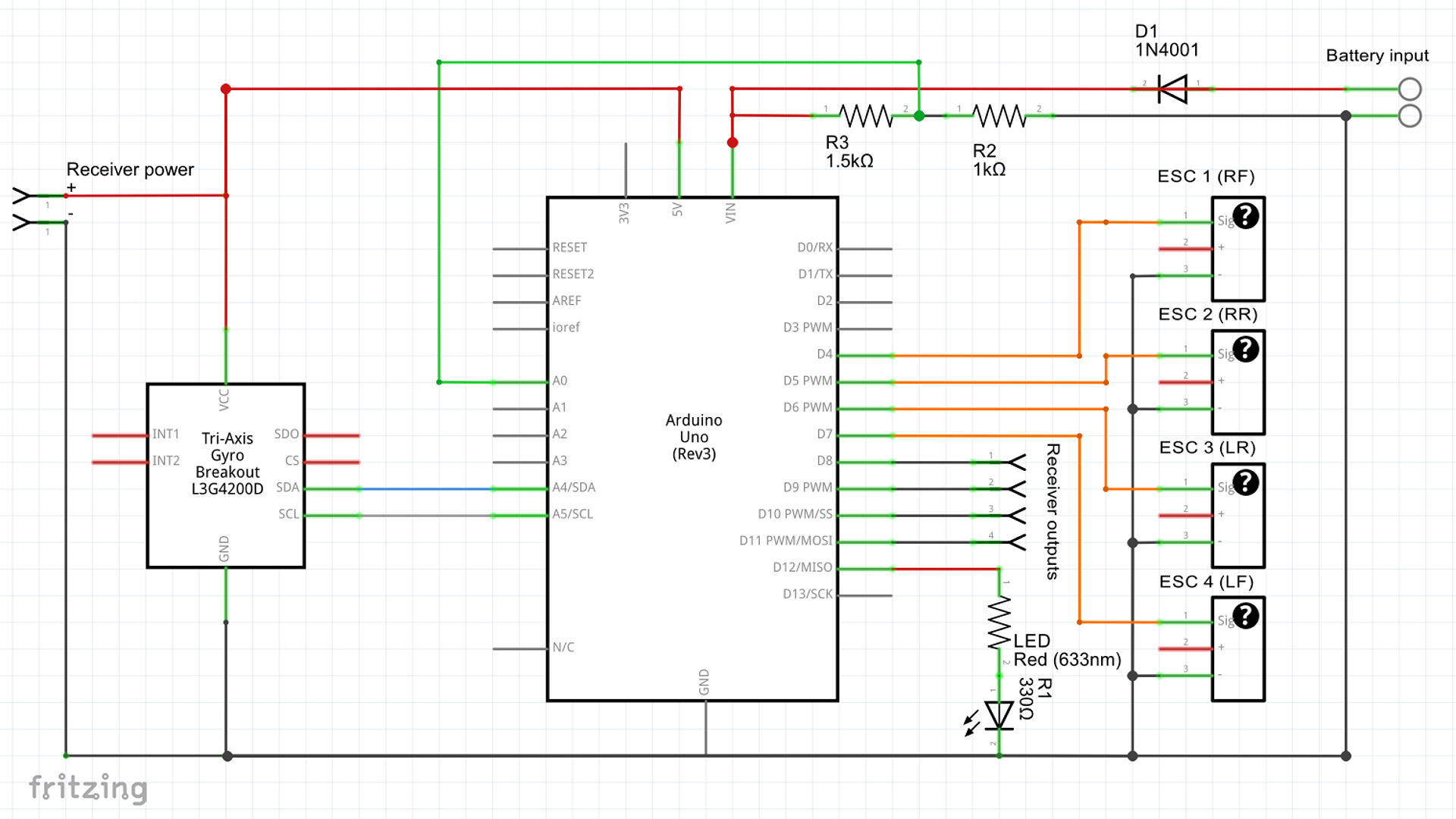
▣ SCHEMATICS
http://www.brokking.net/YMFC-3D/YMFC-3D_schematic.jpg

3.1 The diode D1 and resistors R2 / R3
diode D1은 아두이노랑 컴퓨터랑 연결했을 때, 컴퓨터의 usb 포트를 보호함.
저항은 배터린 전압을 2.5로 나눈다. 이는 비행중에 배터리 전압을 측정하는 방법이다.
배터리 전압이 낮아지면 LED가 켜지고 이를 보완하기 위해 모터 rpm은 자동적으로 올라간다.
3.2 The MPU-6050 gyro / accelerometer
MPU-6050만 해당
▣ MPU-6050 6dof IMU tutorial for auto-leveling quadcopter - Part 1
▣ MPU-6050 6dof IMU tutorial for auto-leveling quadcopter - Part 2
자이로 가장자리와 쿼드 콥터 가장자리 정렬
폼테이프나 다른 dampening material 사용 x
3.3 The transmitter and receiver
거의 모든 4 channel RC transmitter YMFC-AL에 사용가능
가장 중요한 것은 receiver의 아웃풋 펄스. 범위는 1500을 중간으로 1000~2000이다.
수신기의 roll(aileron), pitch(elevator), yaw(rudder), throttle output <--> 아두이노 포트 연결
아두이노로 수신기 신호 읽기
▣ YMFC-3D part 2 - Connect RC transmitter and receiver - Arduino quadcopter
3.4 The ESC's
ESC의 신호선이랑 그라운드만 연결하면 됨.
배터리가 다이오드 D1을 통해 아두이노에게 파워를 주기 때문에 ESC의 5V선은 연결하지 않아도 됨.
아두이노로 컨트롤하기
▣ YMFC-3D part 4 - Arduino quadcopter - Electronic Speed Controller (ESC).
[ Step 4 - Run the setup software ]
프로펠러 제거, 드론 배터리 연결하지 말고 아두이노에 setup program 업로드.
셋업 후에는 모든 셋팅이 아두이노의 EEPROM에 저장됨.
[ Step 5 - Receiver and gyro check ]
프로펠러 제거, 드론 배터리 연결하지 말고 아두이노에 ESC calibration program 업로드.
5.1 Receiver input check
receiver monitor를 시작하기 위해 'r' 보냄.
조종기 스틱을 움직여서 스틱의 움직임과 스크린에 뜬 값이 대응하는지 확인.
모든 채널이 1000~2000사이의 값을 가져야함. 1500은 센터 포지션
5.2 Gyro / accelerometer angle check
수신기 체크 후에 각도 체크를 시작하기 위해 'a' 보냄
자이로가 칼리브레이션하기 때문에 쿼드콥터를 움직이지 말것.
칼리브레이션 후에 roll, pitch angle이 보여진다.
yaw 값은 자이로의 아웃풋이고 yaw방향 회전이 없다면 0으로 갈것이다.
각도가 쿼드콥터의 움직임에 대응하는지 체크.
[ Step 6 - Calibrate the ESC's ]
ESC는 1000us ~ 2000us pulse에서 컨트롤된다.
1000us : off
2000us : full throttle
ESC가 똑같이 동작하도록 만들기위해서 1000us과 2000us 지점을 칼리브레이션 하는 것은 중요하다.
프로펠러 제거하고 ESC calibration program 업로드.
USB 케이블의 연결을 끊고 ESC를 calibrate 하기위해 메뉴얼의 지시를 따라라.
대부분의 경우에 이 과정을 따라하면 된다.
1. throttle stick을 위로 위치시킨다. (full throttle)
2. 드론 배터리 연결
3. 삐소리가 난 후에 throttle stick을 가장 아래로 내려라.
4. 드론 배터리 해제
하지만 정확한 칼리브레이션 과정을 위해서는 너가 쓰는 ESC의 메뉴얼을 확인해라.
[ Step 7 - balance the motors and props ]
모터에 프로펠러를 장착시킨다음 작동시키기 때문에 안전에 조심해라.
7.1 Why is balancing the props important?
프로펠러와 모터가 균형을 맞추지 못하면 센서에 노이즈가 생기고
이는 모터가 제대로 작동하지 못하게 한다.
적은 안정성으로는 쿼드콥터가 수평을 유지할수없다.
7.2 How to balance the props by using the YMFC-AL software
ESC calibration program 업로드 후에 아두이노 시리얼 모니터 열어서 '1' 보냄.
'Test motor 1 (right front CCW)'라고 답장이 올 때까지 기다림.
화면에 출력되는 숫자는 가속도센서에 의해 측정된 진동의 양을 가리킴.
획일화된 값은 아니지만 크기는 줄어야함.
회전 방향과 프로펠러가 상승 추력을 만드는지 확인하라.
모터를 멈추고 싶다면 throttle을 가장 낮은 곳에 위치시켜라.
send '2'는 motor2, '3'는 motor3 '4'는 motor4, '5'는 전체 다 테스트
+ 필요한 경우 표준 PID 설정을 개선하십시오.
PID 제어기에 대해 더 배우고 싶다면 이 동영상을 참고
▣ YMFC-3D part 5 - Quadcopter PID controller and PID tuning.
[ Step 8 - Upload the flight controller software ]
드론 배터리 제거한 후에 flight controller software 업로드.
USB 케이블 연결 끊고 드론 배터리 연결
쿼드콥터를 손에 단단히 쥐고 다음 순서에 따라 모터를 작동
start = throttle down and yaw left
stop = throttle down and yaw right
쿼드콥터는 스스로 수평을 맞춰야한다.
쿼드콥터를 손으로 움직인다면, 쿼드콥터는 수평을 맞추기 위해 움직임을 상쇄시키는 동작을 할 것이다.
수신기의 roll과 pitch 스틱을 움직였을 때, 쿼드 콥터는 같은 방향으로 움직여야한다.
그렇지 않다면 설정을 다시하거나 이 페이지를 재확인해라.
여기까지 이상이 없다면 첫번째 시험운행을 할 시간이다.
+ 소프트웨어의 기술적인 배경을 더 알고싶다면 이 동영상 참고
▣ YMFC video tutorials.
https://www.youtube.com/watch?v=XFxqFQwRumc&list=PL0K4VDicBzsibZqfa42DVxC8CGCMB7G2G
[드론] ESC 에 대해서 알아보기 electronic speed control란?
[드론] ESC 에 대해서 알아보기 electronic speed control란?
안녕하세요 이번에는 드론에 사용되고 있는 ESC(electronic speed control) 에 대해 알아보고자합니다. ...
blog.naver.com
BLDC(통돌이) 모터 아두이노로 제어하기 [아두이노 모터]
https://blog.naver.com/roboholic84/220534990840
BLDC(통돌이) 모터 아두이노로 제어하기 [아두이노 모터]
이번 시간에는 아두이노 우노를 이용하여 BLDC 모터를 사용해 보도록 하겠습니다. BLDC모터는 브러...
blog.naver.com


{kind=link}